")
Eine der beliebten Problemstellungen in den Ingenieurwissenschaften ist das rotative inverse Pendel. In der Regelungs- und Elektrotechnik sowie im Maschinenbau werden damit Bewegungsmuster und Regelungsalgorithmen veranschaulicht und untersucht. Diese helfen beispielsweise beim Steuern von Robotern und sonstigen Maschinen.
Das nach seinem japanischen Erfinder Katsuhisa Furuta benannte Pendel ist einfach aufgebaut. Ein angetriebener Arm rotiert horizontal und ein Pendel, das an diesem Arm befestigt ist, rotiert vertikal. Was Kopfzerbrechen bereitet, ist die theoretische Modellierung und die Anforderung an eine Stabilisierung dieser Bewegungen. Beim Furuta-Pendel ergeben sich zwei Grössen: Die Ausrichtung des Rotationsgelenkes sowie die des Pendels, die sich regeln lassen. Das Pendel wird in der aufrechten, instabilen Lage geregelt – der Arm nimmt dabei eine beliebige Position ein.
Da es sich um ein nichtlineares und instabiles System handelt, eignet es sich zum Experimentieren, um bestehende Regelalgorithmen zu überprüfen und neue Berechnungsverfahren zu entwickeln. Hierbei werden oft Lösungsansätze von Forschungsbereichen wie Robotik, Kontrolltheorie und rechnergestützte Regelung miteinander kombiniert.
Den richtigen Regler finden
Ein geeigneter Regler kann mittels verschiedener Entwurfsstrategien realisiert werden. Passende Reglerstrukturen für ein inverses Pendel sind: PID, LQR, Fuzzy oder selbstlernende neuronale Regler. Das physikalische System mit mehreren Freiheitsgraden kann mathematisch modelliert werden. Für das Aufschwingen des Pendels aus der Ruhelage (Null-Lage) sind nichtlineare Herangehensweisen wie Energieansätze erforderlich. Mit Hilfe der mathematischen Beschreibung wird anschliessend ein passender Regler entworfen. Dieser Regler kann für echtzeitfähige Systeme angenähert beziehungsweise diskretisiert und auf eine Steuerung wie dem MiniMACS6-AMP4 übertragen werden.
Der kompakte Controller
Der MiniMACS6-AMP4 von maxon ist ein programmierbarer Master Controller, samt integrierten Leistungsendstufen. Er ist der stabilisierende Regler für das rotierende inverse Pendel. Damit lassen sich komplexe Bewegungsmuster mit einfachen Befehlen ausführen, beispielsweise bei einem ruckfreiem aufsynchronisieren auf eine drehende Master-Achse. Vorteile der Mehrachssteuerung des MiniMACS6-AMP4: • übernimmt die Master-Funktion; keine übergeordnete Steuerung notwendig • lizenzfreie Motion-Control-Funktionalität inklusive • kompakte Antriebslösung mit integrierten Endstufen Mittels der lizenzfreien Automatisierungssoftware ApossIDE (Integrated Development Environment) lassen sich Positionier- und Synchronisationsaufgaben mit einfachen Befehlen aufsetzen oder eigene Regelalgorithmen via C-Sprache (ApossC) ausführen.
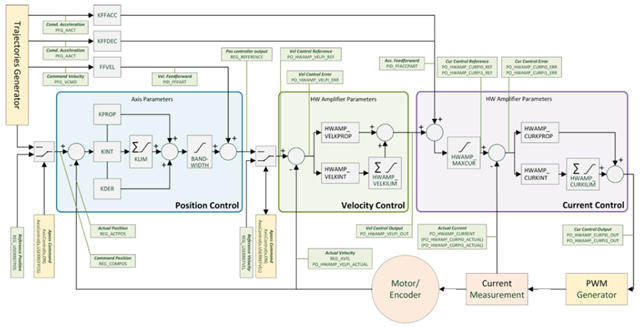
Die Kaskadenregelung
Beispiel einer Kaskadenregelung mit einem maxon Motion Controller wie dem MiniMACS6-AMP4. Dank der kompakten Antriebslösung ist keine übergeordnete Steuerung mehr notwendig.
{kind=link}